Biforcazione imperfetta
In matematica, una biforcazione è detta imperfetta se il suo studio è riconducibile a quello di una biforcazione canonica a meno di un fattore di disturbo.
Un esempio è dato dall'equazione differenziale della biforcazione pitchfork cui viene aggiunta, come imperfezione, una costante :


Se si perde la simmetria classica dei sistemi con biforcazioni a forcone. Per tale ragione è detto parametro di imperfezione.

Studio della funzione
L'equazione differenziale è di difficile studio analitico, poiché vi sono due diversi parametri che fanno variare il sistema (ossia ed ).

Per ovviare a tale problema si considerano vari grafici con fissato e si studia geometricamente il sistema al variare del parametro . In particolare si cercano le intersezioni tra le curve ed .


Caso

Quando la cubica è monotòna non crescente. La linea orizzontale si interseca con la cubica esattamente in un punto per ogni valore di .
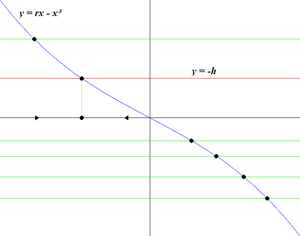
Caso

Quando la curva non è più monotòna, quindi al variare di vi sono una, due o tre intersezioni.
Poiché lo studio delle intersezioni è simmetrico rispetto ad , studiamo i vari casi solo per (ovvero ).



Vi sarà un valore critico del parametro, , in cui la linea orizzontale è esattamente la tangente alla curva . Tale valore sarà dato dal massimo (minimo nel lato simmetrico rispetto all'asse delle ascisse) relativo alla cubica.

Per ricavare il valore del massimo e quello di studiamo la derivata

da cui, scegliendo il valore positivo:

e quindi:


Vediamo che succede diminuendo il parametro :
- per si ha una sola intersezione che corrisponde ad un punto d'equilibrio stabile (la stabilità è facilmente ricavabile sia analiticamente sia geometricamente);

- per nasce un nuovo punto d'equilibrio semistabile (instabile a sinistra e stabile a destra) che si aggiunge al punto d'equilibrio stabile già presente;

- per vi sono, oltre al primo punto fisso stabile, due punti d'equilibrio distinti: uno più centrale rispetto alla simmetria della cubica instabile e l'altro stabile.

Ovviamente una situazione speculare la si verifica per .

Per i valori critici ed vi è l'improvvisa comparsa/scomparsa di due punti d'equilibrio, ovvero si ha, localmente, una biforcazione saddle-node.


Diagramma di biforcazione vs.


Studiando la stabilità tramite diagramma di biforcazione si vede che, se si ha il diagramma solito della biforcazione pitchfork, mentre per si ottengono due curve disgiunte:
- un ramo stabile definito per ogni , che tende a per e a per ;
- una curva definita per composta da un ramo stabile ed uno instabile che per tendono rispettivamente a (in segno opposto al ramo stabile precedente) e a .






Bibliografia
- Strogatz S.H. (1994), Nonlinear Dynamics and Chaos (Perseus Books, Cambridge).
Voci correlate
- Diagramma di biforcazione
- Biforcazione a nodo sella
- Teoria delle biforcazioni
V · D · M  Teoria del caos Teoria del caos | ||
|---|---|---|
| Teoria delle biforcazioni | Biforcazione a forcone · Biforcazione a nodo sella · Biforcazione imperfetta · Biforcazione transcritica · Biforcazione di Hopf · Larva del pino (sistema dinamico) |  |
| Frattali | Arte frattale · Buddhabrot · Burning ship · Compressione frattale · Curva di Koch · Curva di Peano · Curva di Sierpiński · Dimensione di Hausdorff · Dimensione frattale · Funzione di Cantor · Insieme di Cantor · Insieme di Julia · Insieme di Mandelbrot · Frattali per dimensione di Hausdorff · Polvere di Cantor · Sterling · Triangolo di Sierpiński · Dimensione di Minkowski-Bouligand | |
| Attrattori | Attrattore di Lorenz · Attrattore di Hénon · Mappa di Poincaré · Mappa logistica · Mappa a ferro di cavallo · Spazio delle fasi | |
| Teorici del caos | Edward Norton Lorenz · Aleksandr Michajlovič Ljapunov · Benoît Mandelbrot · Edward Ott · Henri Poincaré · David Ruelle · Stephen Wolfram · James Yorke | |
 Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica
Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica








