Théorème de la boule chevelue

Ne doit pas être confondu avec Théorème de calvitie.


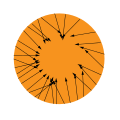
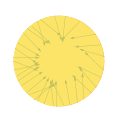
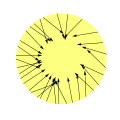
En mathématiques, le théorème de la boule chevelue est un résultat de topologie différentielle. Il s'applique à une sphère supportant en chaque point un vecteur, imaginé comme un cheveu, tangent à la surface. Il affirme que la fonction associant à chaque point de la sphère le vecteur admet au moins un point de discontinuité, ce qui revient à dire que la coiffure contient un épi, ou qu'il y a des cheveux nuls, c'est-à-dire de la calvitie.
De manière plus rigoureuse, un champ de vecteurs continu sur une sphère de dimension paire s'annule en au moins un point.
Ce théorème est démontré pour la première fois par Luitzen Egbertus Jan Brouwer en 1912[1]. Cette approche généralise des résultats démontrés par le passé comme le théorème de Jordan[2] ou les travaux de Leopold Kronecker sur les fonctions continûment différentiables de la sphère réelle de dimension n – 1 dans un espace vectoriel de dimension n[3].
Ces résultats, qui intuitivement se comprennent aisément, imposent, pour une démonstration rigoureuse, des développements parfois techniques. Un exemple archétypal de résultat de même nature est le théorème du point fixe de Brouwer. Il énonce que toute application continue d'une boule fermée d'un espace vectoriel euclidien de dimension finie dans elle-même admet un point fixe. Le théorème de point fixe de Brouwer peut être déduit du théorème de la boule chevelue.
Représentations intuitives du théorème
Intuitivement[4], on peut se représenter une sphère recouverte de cheveux souples et pas frisés, chaque point de la sphère étant la racine d'un cheveu. On considère la projection du cheveu sur le plan tangent à la sphère au point où le cheveu pousse : l'ensemble de ces projections donne une bonne idée d'un champ de vecteurs tangents sur la sphère. On cherche alors à coiffer ces cheveux en les aplatissant sur la surface de la boule, et en évitant les discontinuités : on ne fait pas de raie, on ne permet pas à des cheveux de changer brutalement de direction les uns par rapport aux autres. Le théorème dit qu'il est impossible d'arriver à ce résultat. Quoi qu'on fasse, on va causer la formation d'au moins un épi, c'est-à-dire d'un endroit où un cheveu se dressera.
Énoncé
La sphère réelle de dimension n est la partie de des vecteurs de norme euclidienne 1, soit donc :


On munit cet ensemble de la topologie induite par la distance euclidienne. Cet espace topologique est une sous-variété connexe et compacte de dimension n. Intuitivement, si v est un vecteur unitaire, donc un point de Sn, la sphère peut au voisinage de v être approchée par l'hyperplan affine de ℝn+1 passant par v et orthogonal à v ; la dimension se réfère à la dimension de cet hyperplan, qui est un sous-espace affine. Un champ de vecteurs sur Sn peut se définir comme une application telle que pour tout v dans Sn, X(v) soit orthogonal à v. Le champ est dit continu si l'application est continue.

Théorème de la boule chevelue — Sur une sphère réelle Sn dont la dimension n est paire, tout champ de vecteurs continu X s'annule en un point au moins : il existe v (dépendant de X) tel que X(v) = 0.
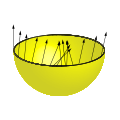
En dimension impaire n = 2m + 1, il existe des champs de vecteurs continus et mieux encore, analytiques, qui ne s'annulent en aucun point : pour tout vecteur v = (s0, t0, …, sm, tm) de ℝn+1 = ℝ2(m+1), le vecteur X(v) := (–t0, s0, …, –tm, sm) est orthogonal à v ; donc si v est unitaire, X(v) est tangent en v à la sphère, ce qui définit bien un champ de vecteurs X sur S2m + 1, continu et jamais nul.
Démonstration visuelle pour la sphère ordinaire
On veut démontrer[5] qu'il ne peut y avoir de champ de vecteurs tangent et continu, qui ne s'annule jamais sur la sphère ordinaire dans l'espace à trois dimensions. On va raisonner par l'absurde et donc supposer qu'il existe sur la sphère un champ de vecteurs tangent, continu et qui ne s'annule jamais.
On dessine sur une brave orange un équateur, un cercle polaire arctique et un cercle polaire antarctique, et on convient de ne voyager le long des parallèles que dans la direction de l'est. On dessine un champ de vecteurs tangent dans les régions arctique et antarctique. Ce champ de vecteurs est à peu près de direction constante, et on peut imaginer que c'est le vent. Si cela gêne le lecteur de penser que le vent est à peu près de direction constante sur une région aussi vaste, il suffit de réduire ces régions par la pensée, et comme le champ de vecteurs représentant le vent est supposé continu, il y aura certainement une zone assez petite pour que le vent y souffle dans une direction fixe, à la précision des mesures près.
On introduit alors un repère mobile, représenté par une figurine en papier : Marinette. Marinette va pouvoir se déplacer le long des parallèles de l'orange, et pour prendre des photos, il a fallu faire une Marinette en papier, collée sur une longue épingle à tête plastique plate. Quand Marinette va vers l'avant, elle prend la direction du premier vecteur de base. Sa main gauche est dans la direction du deuxième vecteur de base, et la direction allant des pieds à la tête de Marinette est celle du troisième vecteur de base, formant ainsi un repère direct.
-
 On voit une orange tatouée d'un équateur et de cercles arctique et antarctique. Le sens de parcours est vers l'est, indiqué par des flèches.
On voit une orange tatouée d'un équateur et de cercles arctique et antarctique. Le sens de parcours est vers l'est, indiqué par des flèches. -
 Le vent est en bleu-vert et le cercle arctique en violet.
Le vent est en bleu-vert et le cercle arctique en violet. -
 Le vent est en bleu-vert et le cercle antarctique en violet.
Le vent est en bleu-vert et le cercle antarctique en violet. -
 Marinette : la figurine est en papier collé sur une longue épingle à tête plate, et la longue épingle est montrée pour ceux qui veulent répéter l'« expérience ».
Marinette : la figurine est en papier collé sur une longue épingle à tête plate, et la longue épingle est montrée pour ceux qui veulent répéter l'« expérience ».




Marinette fait le tour de l'orange en se déplaçant vers l'est le long des parallèles et observe la direction d'où vient le vent. Quand elle fait le tour vers l'est du cercle arctique, le vent tourne autour de sa tête comme suit : elle l'a dans le dos, puis il vient de la gauche, puis dans la figure, de la droite et de nouveau dans le dos. Comme Marinette connaît les conventions des mathématiciens, elle dit que, par rapport à elle, le vent fait un tour dans le sens rétrograde, ce qui est la même chose que faire un tour dans le sens des aiguilles d'une montre.
Quand Marinette fait le tour vers l'est du cercle antarctique, elle a le vent dans le dos, puis il vient de la droite, puis elle l'a dans la figure, puis à gauche et de nouveau dans le dos. Donc, par rapport à Marinette, le vent fait un tour dans le sens direct, ce qui est la même chose que dans le sens contraire des aiguilles d'une montre.
-
 Marinette fait le tour du pôle nord le long du cercle arctique en se déplaçant vers l'est, et dans son repère, le vent tourne une fois autour d'elle dans le sens négatif.
Marinette fait le tour du pôle nord le long du cercle arctique en se déplaçant vers l'est, et dans son repère, le vent tourne une fois autour d'elle dans le sens négatif. -
 Marinette fait le tour du pôle sud le long du cercle antarctique en se déplaçant vers l'est, et dans son repère, le vent tourne une fois autour d'elle dans le sens positif.
Marinette fait le tour du pôle sud le long du cercle antarctique en se déplaçant vers l'est, et dans son repère, le vent tourne une fois autour d'elle dans le sens positif.


Pas besoin de faire effectivement le tour le long de l'équateur pour se représenter ce qui va se passer : si le vent souffle partout le long de l'équateur, alors il va faire un certain nombre de tours autour de Marinette quand elle parcourra son chemin. On ne sait pas combien de tours, mais on sait que ce sera un nombre entier, positif, négatif ou nul. On sait aussi que sur tout parallèle où le vent souffle partout, celui-ci fera un nombre entier de tours par rapport à elle. On se dit enfin que le nombre de tours du vent doit être continu par rapport à la latitude du parallèle. Imaginons que sur un parallèle le vent fasse 5 tours, et que juste un peu plus au nord il n'en fasse que 4 ; dans ce cas, soit le vent s'annule quelque part, soit il est discontinu.
Maintenant, avec Marinette, on sait démontrer le théorème de la boule chevelue : si le vent souffle partout sur la terre-orange tout en variant continument, alors son nombre de tours par rapport à un voyageur parcourant vers l'est un parallèle ne dépend pas de la latitude. Mais il fait –1 tour sur un parallèle assez proche du pôle nord et +1 tour sur un parallèle assez proche du pôle sud. Il y a donc une contradiction !
Formalisation de la démonstration visuelle
Cette formalisation sera d'abord géométrique, puis analytique pour ceux qui se sentent plus sûrs des questions d'orientation quand tout est écrit. On raisonne par l'absurde, en supposant qu'il existe un champ de vecteurs tangent continu et ne s'annulant nulle part sur la sphère .


Version géométrique
On choisit sur la sphère un pôle nord et un pôle sud, ainsi qu'une orientation. On peut alors parler des parallèles de la sphère et les orienter de façon continue. De plus, on peut définir un repère mobile tangent sur la sphère, en dehors des pôles nord et sud. Le premier vecteur du repère mobile est tangent au parallèle passant par ce point et orienté dans la direction de parcours des parallèles, et le second vecteur est perpendiculaire au premier, avec un sens choisi pour se conformer à l'orientation de la sphère. Le champ de vecteurs admet une décomposition dans le repère mobile. On peut donc associer à tout parallèle un nombre d'enroulement : c'est le nombre d'enroulement du champ de vecteurs dans le repère mobile le long de ce parallèle. Ce nombre est bien défini puisque le champ de vecteurs ne s'annule pas. Il dépend continûment de la latitude du parallèle, d'après les résultats standard sur la continuité du nombre d'enroulement, et il est entier. Il est donc constant.

On calcule ce nombre d'enroulement au voisinage du pôle nord. Certes, le repère mobile cesse d'être défini au pôle nord, mais pour pallier cette difficulté, on dilate un parallèle proche du pôle nord en un cercle de rayon unité, et on projette à la fois le champ de vecteurs et le repère mobile sur le plan tangent au pôle nord. L'orientation de ce plan tangent est déduite de celle de la sphère. Par continuité, le nombre d'enroulement ne change pas lors de cette transformation. À la limite, le repère mobile transformé tourne une fois autour du pôle, dans le sens des parallèles, et donc le champ de vecteurs tourne une fois dans le repère mobile. Le nombre d'enroulement vaut donc m et m vaut +1 ou –1, suivant le choix d'orientation des parallèles.
Avec le même raisonnement au voisinage du pôle sud, le repère mobile tourne une fois autour du pôle sud dans le sens des parallèles, mais pour maintenir une orientation cohérente avec celle de la sphère, en tant que plan dans l'espace à trois dimensions, le plan tangent au pôle sud est orienté dans le sens opposé du plan tangent au pôle nord, et donc le nombre d'enroulement du champ est . On a la contradiction souhaitée.

Version analytique
On note le point courant de la sphère et le champ de vecteurs. On paramétrise la sphère en coordonnées sphériques, en la supposant de rayon 1 :



avec et


On remarque que ce paramétrage ne définit ni une bijection ni a fortiori un difféomorphisme.
En chaque point de la sphère distinct des pôles nord et sud, on introduit un repère mobile formé de deux vecteurs tangents à la sphère :
- , de coordonnées et
- , de coordonnées .




Il est immédiat que cette base dépend continûment de et pour et .



Dans cette base, et bien sûr en dehors des pôles nord et sud, le champ de vecteurs admet des coordonnées :
- et


Ces coordonnées dépendent continûment de et , sur . De plus, elles dépendent périodiquement de , avec la période , et elles ne s'annulent pas simultanément.


Pour tout compris strictement entre et , on peut donc définir le nombre d'enroulement du champ de vecteurs



sur le cercle unité. C'est un entier , qui est une fonction continue de , et donc constant.

![{\displaystyle \phi \in ]-\pi /2,\pi /2[}](https://wikimedia.org/api/rest_v1/media/math/render/svg/da1a1bb3d77e311a9c6db347503eaa905d625ee4)
On va maintenant calculer le nombre d'enroulement du champ de vecteurs au voisinage des pôles nord et sud, afin d'arriver à une contradiction.
Soit la valeur du champ de vecteurs au pôle nord. Ses trois composantes sont . Par continuité du champ, on peut trouver un tel que :




On peut aussi choisir assez petit pour avoir


Si l'on note :

alors le calcul donne

pour .

Par conséquent,
- ,

ce qui reste strictement inférieur à .

Donc a le même nombre d'enroulement que et ce dernier vaut .



Le même raisonnement au voisinage du pôle sud montre que si l'on pose

alors pour assez proche de , le nombre d'enroulement de est le même que celui de , c'est donc 1.

On a bien la contradiction souhaitée.
Démonstrations en dimension quelconque
Une démonstration très analytique est due à John Milnor[6]. Dans l'article où il expose la preuve qui va suivre, Milnor évoque la méthode d'Asimov[7], mais l'article d'Asimov fait appel à des notions beaucoup plus avancées que celles qui seront présentées ici, et ne donne par conséquent pas de lumières élémentaires sur la source de cette surprenante démonstration. Une version un peu différente de la démonstration est donnée par C. A. Rogers[8].
La démonstration de Milnor est une démonstration par l'absurde, reposant sur la construction d'une transformation particulière dépendant d'un paramètre réel t et du champ de vecteurs considéré.
Afin de pouvoir utiliser des outils d'analyse, il faut supposer que le champ de vecteurs tangents est continûment différentiable, et donc, à la fin du raisonnement, on se sert d'un processus d'approximation.
La transformation dépendant de t envoie une sphère de rayon r sur une sphère de rayon r√1 + t2. On calcule alors de deux manières différentes le volume de l'image d'une couronne solide par cette transformation. Par la formule du changement de variable dans les intégrales multiples, on obtient une expression polynomiale en t. Par un calcul direct en dimension impaire n + 1, on obtient une expression irrationnelle, puisqu'elle comprend une puissance impaire de √1 + t2, ce qui fournit la contradiction désirée.
D'autres démonstrations sont fondées sur des notions plus savantes de topologie algébrique. Une démonstration classique utilise la caractéristique d'Euler-Poincaré. C'est un nombre qu'on peut obtenir par des méthodes combinatoires pour des ensembles qu'il est possible d'approcher par triangulation. Il permet dans certains cas (théorème de Poincaré-Hopf) de compter le nombre de points d'annulation d'un champ de vecteurs sur une variété. Une autre démonstration provient des propriétés de l'homotopie : on peut prouver que sur une sphère de dimension paire, l'application antipodale x ↦ –x n'est pas homotope à l'identité ; c'est le théorème de Borsuk-Ulam. Enfin, dans le cas de la sphère ordinaire, une démonstration peut se déduire du lemme de Sperner.
La démonstration de Milnor
On note un champ de vecteurs tangents continu sur . Ce champ de vecteurs est une fonction définie sur la sphère et à valeurs dans l'espace euclidien de dimension , avec pair. On va démontrer au moyen d'un raisonnement par l'absurde qu'il s'annule forcément en au moins un point de la sphère. On notera la norme euclidienne d'un vecteur de , et le produit scalaire euclidien de et , appartenant à .







Cas d'un champ de vecteurs X continûment différentiable
Un champ de vecteurs tangents à la sphère est continûment différentiable s'il est la restriction à d'un champ continûment différentiable défini au voisinage de . Comme ici, nous sommes dans une géométrie très simple, il suffit que soit continûment différentiable sur la couronne solide .


Tangent implique que, quel que soit dans la sphère, est orthogonal à .

Supposons donc que ne s'annule jamais sur la sphère . Comme est continûment différentiable, sa norme est aussi continûment différentiable sur la sphère et non nulle. Par conséquent, est un champ tangent, continûment différentiable et pour tout , est de norme 1. On dit aussi qu'il est unitaire.



Comme est continûment différentiable sur la couronne solide , il y est en particulier lipschitzien ; il existe donc un nombre réel L tel que, pour tous et dans , une inégalité de Lipschitz soit vérifiée :


On définit un champ de vecteurs homogène de degré 1 sur tout en posant

et on va montrer que est lipschitzien. Supposons tout d'abord ; alors



d'où, en vertu de l'inégalité triangulaire,

Par homogénéité, on obtient le cas général.
Définissons une fonction sur x ]0,1] par la formule suivante :


On voit que la fonction est homogène de degré 1 par rapport à . De plus, la norme de est facile à calculer, grâce au théorème de Pythagore :


En d'autres termes, l'image par de la sphère de centre 0 et de rayon est incluse dans la sphère de centre 0 et de rayon , quel que soit . Pour , est visiblement nul.






On va montrer qu'en fait cette image est toute la sphère ci-dessus. En vertu de l'homogénéité de par rapport à , il suffit de le montrer pour une seule valeur de , et on choisit . Cela revient à chercher une solution de l'équation

- ,

pour donné, de norme 1.
L'idée consiste à utiliser le théorème du point fixe strictement contractant. On pose

Attention : pour alléger les notations, on ne met pas dans les arguments de , et on le considère comme une constante.

La fonction envoie l'espace euclidien, qui est complet, dans lui-même. Elle est lipschitzienne, de rapport . Par conséquent, si est strictement inférieur à , est une contraction stricte de dans lui-même. Elle possède donc un unique point fixe, satisfaisant l'équation . Donc est solution de . En particulier, d'après le calcul de la norme de effectué ci-dessus, on constate que , et donc l'image de la sphère de rayon par est la sphère de rayon 1.








Par homogénéité, ceci démontre que envoie la sphère de rayon sur la sphère de rayon , et cela quel que soit .

On calcule maintenant de deux manières différentes le volume de l'image par de la couronne solide de centre 0 et de rayons et .


D'une part, cette image est la couronne solide de centre 0 et de rayons et , donc son volume est


avec le volume de la boule unité en dimension .

D'autre part, on sait dériver par rapport à :

puisque est continûment différentiable en dehors de 0. Ici, est simplement l'application linéaire identité dans . Par la formule du changement de variable dans les intégrales multiples, le volume de la boule est donc donné par :


Le déterminant est bien défini dans la formule ci-dessus, puisque est une application linéaire de dans lui-même, paramétrée par . On remarque que le déterminant ne change pas de signe, parce que est un difféomorphisme. Par continuité, il vaut 1 pour nul, et donc il est partout positif. Il est donc inutile de mettre une valeur absolue.

On constate que la première expression du volume est irrationnelle par rapport à la variable , puisque est pair, alors que la deuxième est polynomiale par rapport à cette même variable. C'est la contradiction désirée, on a bien montré qu'un champ continûment différentiable tangent à la sphère s'annule forcément en un point.
Cas général
On suppose cette fois-ci que est un champ tangent continu sur la sphère .
On peut approcher ce champ uniformément par une suite de champs tangents continûment différentiables . On utilisera une technique de convolution, qui est détaillée plus bas, bien qu'elle soit classique.

D'après l'étape précédente, pour chaque , on peut trouver un dans pour lequel s'annule.



Les points appartenant à l'ensemble compact , on peut trouver une sous-suite convergente de la suite des , ou, ce qui revient au même, une partie infinie de telle que la suite possède une limite le long de ; cette limite est notée .



Il est immédiat que, le long de , converge vers , donc s'annule au point .

Approximation continûment différentiable d'un champ de vecteurs tangent continu
Soit une fonction de V dans qui a les propriétés suivantes :

- est continûment différentiable ;
- le support de , c'est-à-dire l'adhérence de l'ensemble de tous les points où n'est pas nul est inclus dans la boule de centre 0 et de rayon 1 ;
- l'intégrale de sur V vaut 1.
Un tel est facile à construire : on choisit tout d'abord une fonction continûment dérivable, positive ou nulle sur valant 1 en 0 et 0 au-delà de 1. Si on suppose que la dérivée de cette fonction est nulle en 0, il suffit de prendre , avec



On vérifie que la fonction ainsi définie a les propriétés requises.
On pose, pour k un entier positif

et on définit

On montre alors que les sont continûment différentiables et convergent uniformément, quand k tend vers l'infini, vers X sur tout ensemble compact inclus dans V, donc en particulier sur .

Mais a priori, il n'y a pas de raison que les soient tangents… donc on doit faire une opération supplémentaire : les projeter. On définit ainsi

Le champ est tangent à la sphère, et il converge uniformément vers le champ , ce qui conclut la construction d'une approximation d'un champ tangent continu par une suite uniformément convergente de champs tangents continûment différentiables, quand k tend vers l'infini.


Conséquences
Les conséquences du théorème sont nombreuses et ne se limitent pas aux mathématiques.
Fusion nucléaire
Une application technologique est donnée par la fusion nucléaire civile. L'objectif est d'obtenir de l'énergie à partir d'une réaction de fusion de même nature que celle qui produit l'énergie des étoiles. Une des difficultés provient du fait que la matière, à l'état de plasma, doit être confinée à une température et une pression trop forte pour qu'aucun matériau ne puisse résister.
Une solution envisagée est le confinement du plasma par un champ magnétique. On parle de confinement « magnétique », par opposition au confinement dit « inertiel », également en cours d'expérimentation, qui ne repose pas sur l'électromagnétisme mais sur des techniques à base de lasers. Un exemple plus précis pourrait être le tokamak, littéralement la contraction (en russe) de « chambre de confinement magnétique toroïdale ». Si une forme sphérique semble la solution la plus naturelle pour ce type de réacteur, le théorème de la boule chevelue implique qu'une telle géométrie est impossible. Il existerait en effet un point à la surface où le champ magnétique de confinement s'annulerait. En un tel point, le plasma ne serait plus confiné par le champ magnétique, et l'objectif de réaction entretenue ne serait pas atteint.
C'est pour cette raison que la forme retenue pour les tokamaks est comme son nom l'indique un tore, c'est-à-dire l'unique géométrie qui n'admet pas d'équivalent du théorème de la boule chevelue. Le projet Joint European Torus est un exemple[9].
Météorologie

Le théorème de l'article possède une conséquence météorologique. Le vent, sur la surface du globe se décrit par une fonction continue. Une modélisation schématique le représente par un champ de vecteurs bi-dimensionnel. Relativement au diamètre de la terre, la composante verticale du vent est en effet négligeable.
Une première manière de satisfaire le théorème de la boule chevelue consiste à imaginer l'existence d'un point de la surface terrestre absolument sans vent. Une telle hypothèse est physiquement irréaliste.
Une modélisation physiquement plus en cohérence avec l'observation implique l'existence d'un complexe cyclonique ou anticyclonique. Le théorème de l'article impose l'existence permanente d'un point sur terre ou le vent se modélise par un système tourbillonnant avec, en son centre un œil où la composante horizontale du vent est nulle. Cette conséquence est de fait observée dans la réalité.
Le théorème n'offre aucune indication sur la taille de l'œil ou sur la puissance des vents qui l'entourent.
Théorème du point fixe de Brouwer
On peut démontrer le théorème du point fixe de Brouwer à partir du théorème de la boule chevelue. Il s'énonce ainsi :
Théorème du point fixe de Brouwer — Soit un entier au moins égal à , et soit la boule fermée centrée à l'origine et de rayon 1 dans l'espace euclidien à dimensions. Soit une application continue de dans elle-même. Alors possède un point fixe ; en d'autres termes, il existe un dans tel que .


Démonstration visuelle pour le disque
La démonstration est encore une fois une démonstration par l'absurde. Supposons qu'il existe une application continue du disque unité dans lui-même, telle que soit distinct de quel que soit dans le disque unité. On va fabriquer une boule chevelue sans épi ni calvitie, et obtenir ainsi une contradiction.

Si on a une application sans point fixe, alors chaque point du disque permet de définir un vecteur non nul, le vecteur .

Maintenant, on prend une balle de tennis, on coupe soigneusement la peau de la balle le long de l'équateur, et on détache chacune des demi-sphères de peau. Comme elles sont en caoutchouc, on peut les déformer et les appliquer soigneusement tour à tour sur le demi-disque.
-
 Le disque avec les vecteurs attachés chacun à leur origine .
Le disque avec les vecteurs attachés chacun à leur origine . -
 La balle de tennis incisée le long de son équateur avec son noyau en caoutchouc.
La balle de tennis incisée le long de son équateur avec son noyau en caoutchouc. -
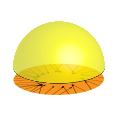 L'hémisphère du haut rendu transparent et déplacé au-dessus du disque.
L'hémisphère du haut rendu transparent et déplacé au-dessus du disque. -
 On aplatit l'hémisphère du haut, transparent, sur le disque.
On aplatit l'hémisphère du haut, transparent, sur le disque.




Une fois la première demi-sphère appliquée sur le disque, il est facile de dessiner en chaque point un vecteur, qui a la même direction que , mais qui est de norme , pour ne pas se compliquer la tâche. On relâche alors la demi-sphère, et par un miracle mathématique, les vecteurs dessinés deviennent des vecteurs tangents non nuls. On fait la même chose pour le deuxième demi-hémisphère : on copie le champ de vecteurs, puis on le relâche, si bien qu'il reprend sa forme, et il est muni d'un champ de vecteurs tangent qui ne s'annule pas.
-
 L'hémisphère du haut, toujours aplati, mais avec copie des vecteurs.
L'hémisphère du haut, toujours aplati, mais avec copie des vecteurs. -
 L'hémisphère du haut reprend sa forme, avec les vecteurs collés.
L'hémisphère du haut reprend sa forme, avec les vecteurs collés.


Au bord de chacun des deux demi-hémisphères, le champ de vecteurs se trouve dans un plan vertical. Si on remettait les deux hémisphères sur la balle de tennis, on n'aurait pas un champ continu. Mais cela se corrige : sur le deuxième hémisphère, on transforme le champ de vecteurs de la façon suivante : en chaque point, le champ se trouve dans un plan tangent, et dans ce plan, on reflète le vecteur par rapport à la tangente au parallèle en ce point.
-
 L'hémisphère du bas est d'abord l'image de celui du haut dans un miroir horizontal. On n'a représenté que les vecteurs du devant.
L'hémisphère du bas est d'abord l'image de celui du haut dans un miroir horizontal. On n'a représenté que les vecteurs du devant. -
 Maintenant, les vecteurs attachés à l'hémisphère du bas sont symétrisés. On n'a représenté que les vecteurs du devant.
Maintenant, les vecteurs attachés à l'hémisphère du bas sont symétrisés. On n'a représenté que les vecteurs du devant. -
 L'hémisphère du bas prêt à être recollé à l'hémisphère du haut. Ses vecteurs sont en rouge pour faciliter la lecture de la figure, et ils sont en continuité avec ceux de l'hémisphère du haut.
L'hémisphère du bas prêt à être recollé à l'hémisphère du haut. Ses vecteurs sont en rouge pour faciliter la lecture de la figure, et ils sont en continuité avec ceux de l'hémisphère du haut.



À ce moment-là, on recolle les deux hémisphères sur la balle, et cette fois-ci leurs champs tangents se raccordent continûment, fournissant ainsi une chevelure continue et sans calvitie à la boule, ce qui donne la contradiction désirée.
Démonstration dans le cas général pour n'importe quelle boule
La démonstration générale est une formalisation de la démonstration visuelle qui précède, dans le cas des boules de dimension paire. Le cas de dimension impaire est déduit du cas de dimension paire par abaissement dimensionnel.
Un corollaire anecdotique
Le résultat suivant d'algèbre linéaire est bien plus élémentaire et général (il reste immédiat quand on remplace R par n'importe quel anneau commutatif de caractéristique différente de 2), mais peut être vu, dans le cas particulier du corps des réels, comme un corollaire du théorème de la boule chevelue :
- Une matrice antisymétrique A d'ordre impair à coefficients dans R n'est pas inversible (car son déterminant est nul). Ou encore : la forme bilinéaire antisymétrique associée est dégénérée.
En effet, pour tout vecteur v de l'espace euclidien V sur lequel agit A, on a : et donc . En particulier, définit par restriction un champ de vecteurs continu sur la sphère unité de V, qui est une sphère de dimension paire. Ce champ admet un point d'annulation v. Ce vecteur unitaire v appartient donc au noyau de A.



Bibliographie
- (en) John Milnor, Topology from the Differentiable Viewpoint [détail des éditions]
- W. G. Chinn et N. E. Steenrod, Topologie élémentaire, Dunod, 1991 (ISBN 2040048480)
- (en) M. Eisenberg et R. Guy, « A Proof of the Hairy Ball Theorem », dans Amer. Math. Monthly, vol. 86, no 7, 1979, p. 571-574
Notes et références
- ↑ (de) Luitzen Egbertus Jan Brouwer, « Über Abbildung von Mannigfaltigkeiten », Mathematische Annalen, 1912 [lire en ligne].
- ↑ Ce théorème énonce qu'un lacet simple divise le plan en deux composantes connexes. Il est finalement démontré rigoureusement en 1905 : (en) Oswald Veblen, « Theory on plane curves in non-metrical analysis situs », Transactions of the American Mathematical Society, vol. 6, 1905, p. 83-98.
- ↑ (de) Leopold Kronecker, « Über Systeme von Funktionen mehrerer Variabeln », Monatsber. Berlin Akad., 1869, p. 159-193 et 688-698.
- ↑ Cette description est reprise ici de Benoît Rittaud, « « Le théorème de la boule de billard chevelue »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?), Le journal de maths des élèves, vol. 1, no 1, 1994, ENS de Lyon.
- ↑ Cette démonstration est inspirée d'un énoncé d'examen de mathématiques à l'université Pierre-et-Marie-Curie. On y trouve une référence, par exemple dans la page de discussion du site « Phorum 5 de géométrie »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?) par Les mathématiques.net.
- ↑ (en) [PDF] J. Milnor, « Analytic proofs of the “hairy ball theorem” and the Brouwer fixed point theorem », American Mathematical Monthly, vol. 85, 1978, p. 521-524 [lire en ligne].
- ↑ (en) D. Asimov, « Average Gaussian curvature of leaves of a foliation », Bulletin of the American Mathematical Society, vol. 84, 1978, p. 131-133.
- ↑ (en) C. A. Rogers, « A less strange version of Milnor's proof of Brouwer fixed point theorem », American Mathematical Monthly, vol. 87, 1980, p. 525-527.
- ↑ [PDF] L. Lemaire, La recherche mathématique aujourd’hui, Université libre de Bruxelles, 2000 [lire en ligne], p. 22.
Voir aussi
Articles connexes
Lien externe
Jean Mawhin, « Autour du théorème de point fixe », conférence aux journées La face cachée des mathématiques de 2004
 Portail des mathématiques
Portail des mathématiques








