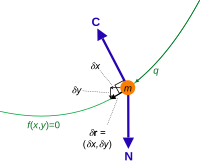
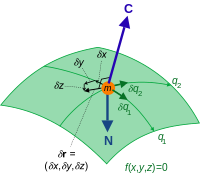
Constraint force C and virtual displacement δr for a particle of mass m confined to a curve. The resultant non-constraint force is N. The components of virtual displacement are related by a constraint equation.
In analytical mechanics, a branch of applied mathematics and physics, a virtual displacement (or infinitesimal variation)  shows how the mechanical system's trajectory can hypothetically (hence the term virtual) deviate very slightly from the actual trajectory
shows how the mechanical system's trajectory can hypothetically (hence the term virtual) deviate very slightly from the actual trajectory  of the system without violating the system's constraints.[1][2][3]: 263 For every time instant
of the system without violating the system's constraints.[1][2][3]: 263 For every time instant 
 is a vector tangential to the configuration space at the point
is a vector tangential to the configuration space at the point  The vectors show the directions in which
The vectors show the directions in which  can "go" without breaking the constraints.
can "go" without breaking the constraints.
For example, the virtual displacements of the system consisting of a single particle on a two-dimensional surface fill up the entire tangent plane, assuming there are no additional constraints.
If, however, the constraints require that all the trajectories pass through the given point  at the given time
at the given time  i.e.
i.e.  then
then 
Notations
Let  be the configuration space of the mechanical system,
be the configuration space of the mechanical system,  be time instants,
be time instants, 
![{\displaystyle C^{\infty }[t_{0},t_{1}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/85798b3097b9ca83d45b2d889d5499d05ec9bd1b) consists of smooth functions on
consists of smooth functions on ![{\displaystyle [t_{0},t_{1}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ffe2ab6560fe2acf9a63ad878ad482164b79012d) , and
, and
![{\displaystyle P(M)=\{\gamma \in C^{\infty }([t_{0},t_{1}],M)\mid \gamma (t_{0})=q_{0},\ \gamma (t_{1})=q_{1}\}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2dc1492c3cc5ebe8f103379d3fdf8fc00e0ea805)
The constraints 
 are here for illustration only. In practice, for each individual system, an individual set of constraints is required.
are here for illustration only. In practice, for each individual system, an individual set of constraints is required.
Definition
For each path  and
and  a variation of is a function
a variation of is a function ![{\displaystyle \Gamma :[t_{0},t_{1}]\times [-\epsilon _{0},\epsilon _{0}]\to M}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd9c230b9d5d1aed3ddd9872afa3e50ec86870ac) such that, for every
such that, for every ![{\displaystyle \epsilon \in [-\epsilon _{0},\epsilon _{0}],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b12ca8a410cf15d4b6fffab57c8b5f20574d6e18)
 and
and  The virtual displacement
The virtual displacement ![{\displaystyle \delta \gamma :[t_{0},t_{1}]\to TM}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e7f44d7c721456150544e2c246bb2be6b394c8ae)
 being the tangent bundle of
being the tangent bundle of  corresponding to the variation
corresponding to the variation  assigns[1] to every
assigns[1] to every ![{\displaystyle t\in [t_{0},t_{1}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1b698b33a7f49fc270026c5ecaaad66a0e9e588a) the tangent vector
the tangent vector

In terms of the tangent map,

Here ![{\displaystyle \Gamma _{*}^{t}:T_{0}[-\epsilon ,\epsilon ]\to T_{\Gamma (t,0)}M=T_{\gamma (t)}M}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b12003e98c00a2321c5adb819d6b6489598d4a67) is the tangent map of
is the tangent map of ![{\displaystyle \Gamma ^{t}:[-\epsilon ,\epsilon ]\to M,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/66857af388e796971d6de28849e9f34a8f7c13c4) where
where  and
and ![{\displaystyle \textstyle {\frac {d}{d\epsilon }}{\Bigl |}_{\epsilon =0}\in T_{0}[-\epsilon ,\epsilon ].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8ee73378b08df19b8f82af809c06d1da8ae8dd2f)
Properties
- Coordinate representation. If
 are the coordinates in an arbitrary chart on and
are the coordinates in an arbitrary chart on and  then
then
![{\displaystyle \delta \gamma (t)=\sum _{i=1}^{n}{\frac {d[q_{i}(\Gamma (t,\epsilon ))]}{d\epsilon }}{\Biggl |}_{\epsilon =0}\cdot {\frac {d}{dq_{i}}}{\Biggl |}_{\gamma (t)}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/03040a9a0724da8c0b16cc0b6559e5bec3cd5059)
- If, for some time instant
 and every
and every 
 then, for every
then, for every
- If
 then
then 
Examples
Free particle in R3
A single particle freely moving in  has 3 degrees of freedom. The configuration space is
has 3 degrees of freedom. The configuration space is  and
and ![{\displaystyle P(M)=C^{\infty }([t_{0},t_{1}],M).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c087dbbba817e68fee879b05a701a9537646a51a) For every path and a variation
For every path and a variation  of
of  there exists a unique
there exists a unique  such that
such that  as
as  By the definition,
By the definition,

which leads to

Free particles on a surface
 particles moving freely on a two-dimensional surface
particles moving freely on a two-dimensional surface  have
have  degree of freedom. The configuration space here is
degree of freedom. The configuration space here is

where  is the radius vector of the
is the radius vector of the  particle. It follows that
particle. It follows that

and every path may be described using the radius vectors  of each individual particle, i.e.
of each individual particle, i.e.

This implies that, for every 

where  Some authors express this as
Some authors express this as

Rigid body rotating around fixed point
A rigid body rotating around a fixed point with no additional constraints has 3 degrees of freedom. The configuration space here is  the special orthogonal group of dimension 3 (otherwise known as 3D rotation group), and We use the standard notation
the special orthogonal group of dimension 3 (otherwise known as 3D rotation group), and We use the standard notation  to refer to the three-dimensional linear space of all skew-symmetric three-dimensional matrices. The exponential map
to refer to the three-dimensional linear space of all skew-symmetric three-dimensional matrices. The exponential map  guarantees the existence of
guarantees the existence of  such that, for every path its variation
such that, for every path its variation  and
and ![{\displaystyle t\in [t_{0},t_{1}],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4847c9b0f63dc7d2c7aecba6205b2352472fc1be) there is a unique path
there is a unique path ![{\displaystyle \Theta ^{t}\in C^{\infty }([-\epsilon _{0},\epsilon _{0}],{\mathfrak {so}}(3))}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cf137d0b487f1689de0a4f613af52bcbdb5c5d42) such that
such that  and, for every
and, for every  By the definition,
By the definition,

Since, for some function ![{\displaystyle \sigma :[t_{0},t_{1}]\to {\mathfrak {so}}(3),}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e0b054fedff1379eb44ac9820349f4eba5da688b)
 , as
, as  ,
,

See also
- D'Alembert principle
- Virtual work
References
- ^ a b Takhtajan, Leon A. (2017). "Part 1. Classical Mechanics". Classical Field Theory (PDF). Department of Mathematics, Stony Brook University, Stony Brook, NY.
- ^ Goldstein, H.; Poole, C. P.; Safko, J. L. (2001). Classical Mechanics (3rd ed.). Addison-Wesley. p. 16. ISBN 978-0-201-65702-9.
- ^ Torby, Bruce (1984). "Energy Methods". Advanced Dynamics for Engineers. HRW Series in Mechanical Engineering. United States of America: CBS College Publishing. ISBN 0-03-063366-4.